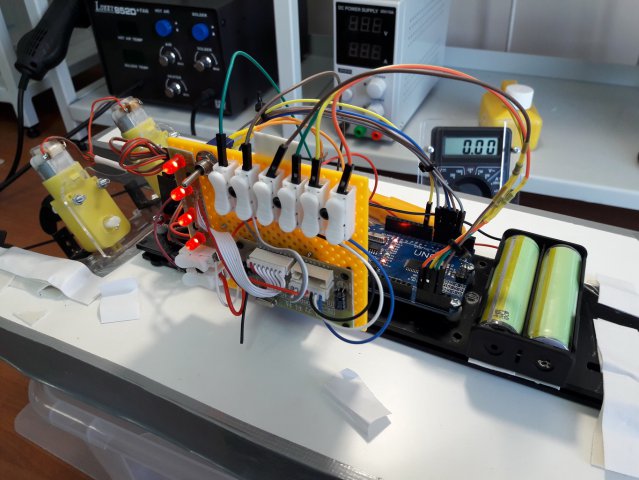
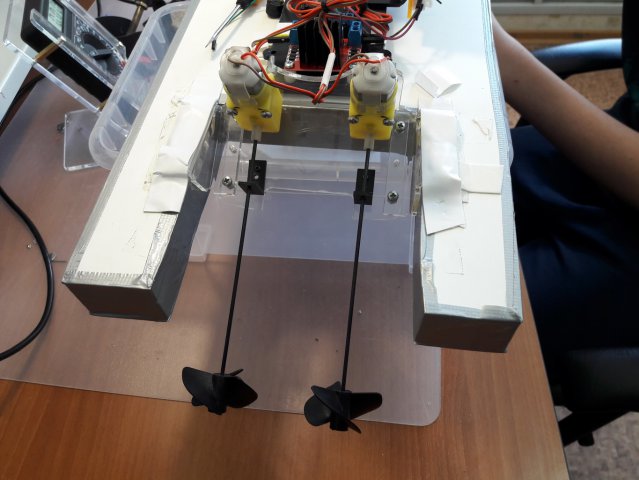
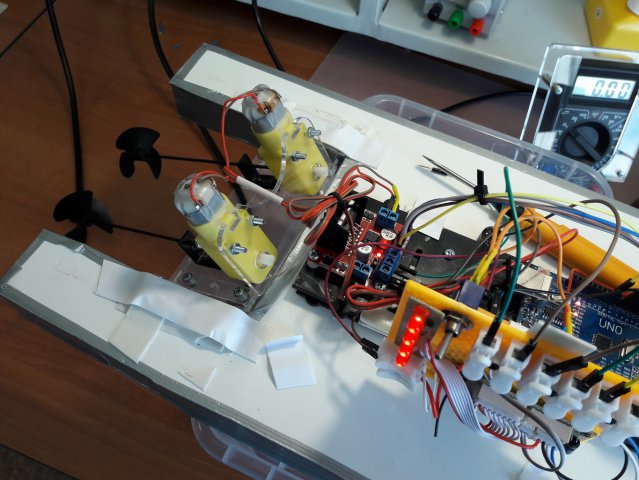
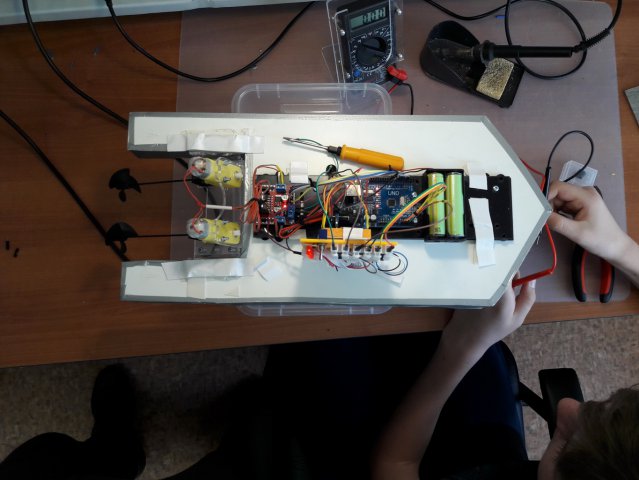
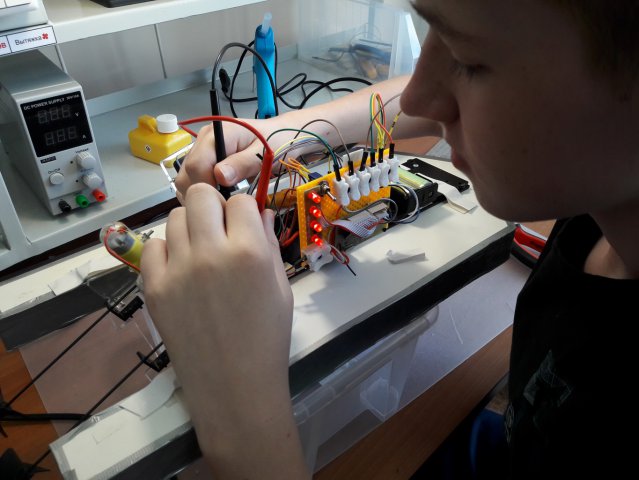
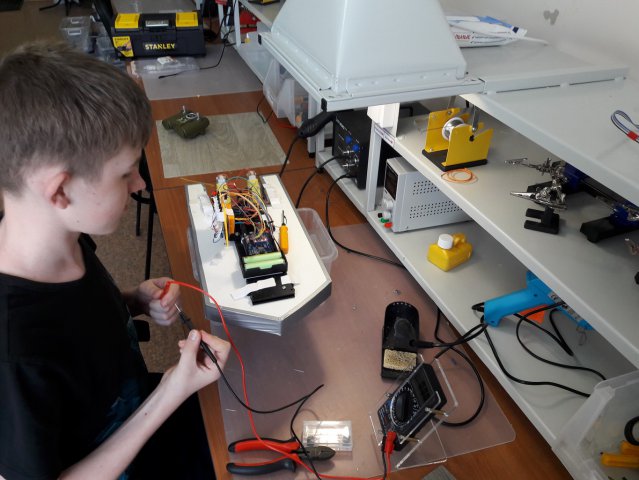
Лодка под управлением Arduino UNO - это индивидуальный проект самого изобретательного нашего ученика Чернова Никиты 13 лет. В качестве плавбазы был взят оконный пвх сэндвич толщиной 38 мм. Данный материал имеет плавучесть пенопласта (так как состоит на 95% из него) и облицован пхв глянцевым пластиком придающим корпусу законченный финишный вид. В качестве силовой установки мы используем нашу любимую связку мотор-редуктор TT 1:48 и драйвер L298N. Данную связку, состоящую из 2-ух моторов мы закрепили на заранее созданной платформе из прозрачного акрила 3 мм в кормовой части корпуса лодки. Дистанционным джойстиком управления послужил готовый трёхканальный модуль с индикацией, с отличительной особенностью - частота радиоканала не 33 Мгц или 430 а 2,4 Ггц, что само говорит за себя - это и качество сигнала и дальность расстояния. Последнее составляет 40-50 метров по прямой видимости без всяких антенн как со стороны радиомодуля, так и со стороны джойстика управления. Сердцем нашей лодки является управляющий контроллер Arduino UNO, именно он подает нужные сигналы на драйвер для управления вращением гребных винтов. На лодке отсутствует руль курса (поворотов) его роль возложена на поочередное их включение, то есть для поворота налево мы оставляем включенный правый мотор, а левый отключаем или всё наоборот для поворота в другую сторону. Допускается включение гребных винтов в разные стороны для достижения быстрого разворота на месте. Да и сам джойстик этому способствует, ведь если всмотреться в него, то это джойстик для управления танком. В таком подходе управления лодкой есть как плюсы так и минусы. Из плюсов можно выделить движение и управление рулежкой задним ходом (например отплыть и развернуться от стены водорослей, которые перегородили путь и практически создали тупиковую ситуацию) . Из минусов: есть один неприятный момент - это скорость и радиус разворота, он очень большой для такой небольшой модели лодки. Все такие гребные винты находятся близко к друг другу и вихревой силы вектора потока не хватает чтобы моментально произвести разворот по малому радиусу.
Сейчас нами одновременно проектируется 3 модели лодки :
лодка с классическим рулем курса (баллер управляется сервоприводом)
лодка с гребными колесами по бортам
лодка с классическим рулем на Arduino APM + GPS














 Записать ребёнка в секцию
Записать ребёнка в секцию

